

 Курсовая работа: Градиентный метод первого порядка
Курсовая работа: Градиентный метод первого порядка
Метод крутого восхождения, или иначе метод Бокса-Уилсона, объединяет в себе достоинства трех методов - метода Гаусса-Зейделя, метода градиентов и метода полного (или дробного) факторного экспериментов, как средства получения линейной математической модели. Задача метода крутого восхождения заключается в том, чтобы шаговое движение осуществлять в направлении наискорейшего возрастания (или убывания) выходной переменной, то есть по grad y(X). В отличии от метода градиентов, направление корректируется не после каждого следующего шага, а при достижении в некоторой точке на данном направлении частного экстремума целевой функции, как это делается в методе Гаусса-Зейделя. В точке частного экстремума ставится новый факторный эксперимент, определяется математическая модель и вновь осуществляется крутое восхождение. В процессе движения к оптимуму указанным методом регулярно проводиться статистический анализ промежуточных результатов поиска. Поиск прекращается, когда квадратичные эффекты в уравнении регрессии становятся значимыми. Это означает, что достигнута область оптимума.
Опишем принцип использования градиентных методов на примере функции двух переменных
![]() (8)
(8)
при наличии двух дополнительных условий:
![]() ,
, ![]() .(9)
.(9)
Этот
принцип (без изменения) можно применить при любом числе переменных, а также
дополнительных условий. Рассмотрим плоскость x1, x2 (Рис. 1). Согласно формуле (8)
каждой точке соответствует некоторое значение F. На Рис.1 линии F = const, принадлежащие этой плоскости,
представлены замкнутыми кривыми, окружающими точку M*, в которой F
минимально. Пусть в начальный момент значения x1 и x2 соответствуют точке M0. Цикл расчета начинается с серии пробных шагов.
Сначала величине x1 дается небольшое приращение ![]() ; в
это время значение x2 неизменно. Затем определяется
полученное при этом приращение
; в
это время значение x2 неизменно. Затем определяется
полученное при этом приращение ![]() величины F, которое можно считать пропорциональным значению частной
производной
величины F, которое можно считать пропорциональным значению частной
производной
![]() (10)
(10)
(если
величина ![]() всегда одна и та же).
всегда одна и та же).
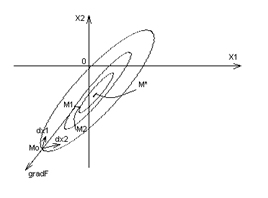
Рис.1
Далее
дается приращение ![]() величине x2. В это время x1 = const. Получаемое при этом приращение
величине x2. В это время x1 = const. Получаемое при этом приращение ![]() величины F является мерой другой частной
производной:
величины F является мерой другой частной
производной:
![]() . (11)
. (11)
Определение
частных производных ( 10 ) и ( 11 ) означает, что найден вектор с координатами ![]() и
и ![]() ,
который называется градиентом величины F и обозначается так:
,
который называется градиентом величины F и обозначается так:
 .
(12)
.
(12)
Известно, что направление этого вектора совпадает с направлением наиболее крутого возрастания величины F. Противоположное ему направление – это «наискорейший спуск», другими словами, наиболее крутое убывание величины F.
После
нахождения составляющих градиента пробные движения прекращаются и
осуществляются рабочие шаги в направлении, противоположном направлению
градиента, причем величина шага тем больше, чем больше абсолютная величина
вектора grad F. Эти условия осуществляются, если величины рабочих шагов ![]() и
и ![]() пропорциональны
полученным ранее значениям частных производных:
пропорциональны
полученным ранее значениям частных производных:
 ,
,  , (13)
, (13)
где α – положительная константа.
После
каждого рабочего шага оценивается приращение ![]() величины F. Если оно оказывается отрицательным, то движение происходит
в правильном направлении и нужно двигаться в том же направлении M0M1 дальше. Если же в точке M1 результат измерения показывает, что
величины F. Если оно оказывается отрицательным, то движение происходит
в правильном направлении и нужно двигаться в том же направлении M0M1 дальше. Если же в точке M1 результат измерения показывает, что ![]() , то рабочие движения
прекращаются и начинается новая серия пробных движений. При этом определяется
градиент gradF в новой точке M1, затем рабочее движение продолжается по новому
найденному направлению наискорейшего спуска, т. е. по линии M1M2, и т.д. Этот метод называется методом наискорейшего
спуска/крутого восхождения.
, то рабочие движения
прекращаются и начинается новая серия пробных движений. При этом определяется
градиент gradF в новой точке M1, затем рабочее движение продолжается по новому
найденному направлению наискорейшего спуска, т. е. по линии M1M2, и т.д. Этот метод называется методом наискорейшего
спуска/крутого восхождения.
Когда система находится вблизи минимума, показателем чего является малое значение величины
 (14)
(14)
происходит переключение на более «осторожный» метод поиска, так называемый метод градиента. От метода наискорейшего спуска он отличается тем, что после определения градиента gradF делается лишь один рабочий шаг, а затем в новой точке опять начинается серия пробных движений. Такой метод поиска обеспечивает более точное установление минимума по сравнению с методом наискорейшего спуска, между тем как последний позволяет быстрее приблизиться к минимуму. Если в процессе поиска точка М доходит до границы допустимой области и хотя бы одна из величин М1, М2 меняет знак, метод меняется и точка М начинает двигаться вдоль границы области.
Эффективность метода крутого восхождения зависит от выбора масштаба переменных и вида поверхности отклика. Поверхность со сферическими контурами обеспечивает быстрое стягивание к оптимуму.
К недостаткам метода крутого восхождения следует отнести:
1. Ограниченность экстраполяции. Двигаясь вдоль градиента, мы основываемся на экстраполяции частных производных целевой функции по соответствующим переменным. Однако форма поверхности отклика может изменяться и необходимо изменять направление поиска. Другими словами, движение на плоскости не может быть продолжительным.
2. Трудность поиска глобального оптимума. Метод применим для отыскания только локальных оптимумов.
Алгоритм градиентного метода
Представим последовательность расчета: расчет составляющих градиента.
Практически расчет составляющих градиента реализуется вычислением произведений коэффициентов регрессии на соответствующие интервалы варьирования значимых факторов.
Тогда уравнение
пкфв н(Ч) = и1р1 + и2р2 + … + итрт
примет вид
grad ![]() (X)= b1
(X)= b1![]() + b2
+ b2![]() + … + bn
+ … + bn![]()
т.е. в качестве шагов крутого восхождения выбираются интервалы варьирования факторов.
Выбор базового фактора:
Фактор, для которого произведение коэффициента регрессии на интервал варьирования максимально, принимается базовым:
max (bi![]() ) = a
) = a
Выбор шага крутого восхождения:
Для базового (или другого) фактора выбирают шаг крутого восхождения ha. Обычно его выбирают по совету технологов или по имеющейся априорной информации.
Пересчет составляющих градиента:
Здесь используется условие: умножение составляющих градиента на любое положительное число дает точки, также лежащие на градиенте.
Составляющие градиента пересчитывают по выбранному шагу крутого восхождения базового фактора:
hi=  (*)
(*)
Коэффициенты bi в выражении (*) берутся со своими знаками, шаги hi округляют.
Принятие решений после крутого восхождения:
После того, как экспериментальная проверка определила некоторую оптимальную точку, крутое восхождение считается завершенным. Здесь, как и ранее, необходимо принимать решения, которые зависят, прежде всего, от эффективности крутого восхождения. Большое влияние на результаты принятия решений оказывает информация об адекватности или неадекватности линейной модели и о положении области оптимума. Конечно, сведения о положении области оптимума носят весьма неопределенный характер и зависят от конкретной задачи, где переменная состояния – например, прочность материала на разрыв. Однако можно безошибочно оценить положение оптимума, если переменная состояния - выход целевого продукта в процентах.
Математическое описание системы и значения переменных
В нашем случае имеем:
При
построении математической модели определённого в условии технологического
процесса одновременно решается задача оптимизации поверхности отклика ![]() , то
есть определяются значения факторов, при которых
, то
есть определяются значения факторов, при которых ![]() , что означает, что
, что означает, что ![]() .
Известно, что одним из наиболее эффективных методов решеня задачи является
градиентный метод. Согласно ему в данном случае (исходя из условий задачи) из
каждой точки направление движения осуществляется в сторону, противоположную
самому градиенту. Отсюда в каждой точке необходимо провести расчет градиента
следующего вида:
.
Известно, что одним из наиболее эффективных методов решеня задачи является
градиентный метод. Согласно ему в данном случае (исходя из условий задачи) из
каждой точки направление движения осуществляется в сторону, противоположную
самому градиенту. Отсюда в каждой точке необходимо провести расчет градиента
следующего вида:
![]() , где
i и k – единичные орты
, где
i и k – единичные орты
Как правило, определить всю математическую модель процесса достаточно сложно, поэтому здесь нужно воспользоваться следующей процедурой:
1. В окрестности начальной точки
![]()
производится полный факторный эксперимент или дробный факторный эксперимент. Мы будем использовать полный факторный эксперимент.
Следует охарактеризовать общие положения проведения полного факторного эксперимента:
Применение полного факторного эксперимента позволяет найти оптимальное расположение точек в факторном пространстве и осуществить линейное преобразование координат, благодаря чему обеспечивается возможность преодолеть недостатки классического регрессионного анализа, в частности корреляцию между коэффициентами уравнения регрессии.
Некоторые обозначения для дальнейшего понимания изложения материала:
Xj-факторы;
Рj- регрессионные коэффициенты системы;
Y- выходная переменная (функция отклика);
М [f]- математическое ожидание помехи;
D [f] – дисперсия помехи;
l – число уровней ;
k – количество факторов;
Уровень факторов – граница исследования области по данному параметру;
Точка с координатами (Х0(1), Х0(2), …) - центр плана, или основной уровень;
![]() - единица варьирования, или интервал
варьирования;
- единица варьирования, или интервал
варьирования;
S – дисперсия;
вектор В - вектор коэффициентов регрессии;
N - число опытов в матрице планирования;
Р - коэффициент взаимодействия;
bj - несмешанные оценки;
![]() - генеральные коэффициенты;
- генеральные коэффициенты;
S2воспр - дисперсия воспроизводимости;
tj - критерий Стьюдента;
F – критерий Фишера.
Выбор плана исследования эксперимента определяется постановкой задачи исследования и особенностями объекта. Пусть имеем математическую модель системы:
![]()
Также нам известны характер помехи и статистические параметры: М[f] = 0 и D[f] = 0,8. Необходимо отметить, что под помехами понимают ряд факторов, искажающих результаты опыта. Если существуют определённые априорные сведения об источнике помех, то можно построить оптимальные планы исследования, учитывающие их влияние, и повысить таким образом точность анализа результата.
В данной задаче требуется провести полный факторный эксперимент.
Полный факторный эксперимент, или метод планирования эксперимента позволяет свести к минимуму число необходимых опытов и одновременно получить оптимальные значения искомых функций. При планировании эксперимента, условия опыта представляют собой фиксированное число значений для каждого фактора. Полный факторный эксперимент фактически представляет собой применение классических метода наименьших квадратов и регрессионного анализа, проводимых по определённому плану.
Процесс исследования обычно разбивается на отдельные этапы. Информация, полученная после каждого этапа, определяет дальнейшую стратегию эксперимента. Таким образом возникает возможность оптимального управления экспериментом. Планирование эксперимента позволяет одновременно варьировать все факторы и получать количественные оценки основных эффектов и эффектов взаимодействия.
Интересующие исследователя эффекты определяются со значительно меньшей ошибкой, чем та, которая характерна для других методов исследования.
В конечном счете, применение методов планирования эксперимента значительно повышает эффективность эксперимента.
Так как при планировании по схеме полного факторного эксперимента реализуются все возможные комбинации факторов на всех выбранных для исследования уровнях, то необходимое число опытов N при полном факторном эксперименте определяется по формуле: N=lk.
Если эксперименты проводятся только на двух уровнях при двух значениях факторов и при этом в процессе эксперимента осуществляются все возможные комбинации из k факторов, то такой план носит название полный факторный эксперимент типа 2k.
Описание алгоритма моделирования сводится к следующему:
1. Определяется для любого фактора:
Х0 j = (Х j max + Х j min ) / 2,
![]() = (Хjmax - Хjmin) / 2, j = 1,2,…..k ;
= (Хjmax - Хjmin) / 2, j = 1,2,…..k ;
2. От основной системы координат (Х1, Х2 , …Хn ) переходим к безразмерной системе координат (U1, U2 , …Un ) c помощью формулы перехода:
Uj = (Х
j - Х
j0 ) / ![]() , j =
1,2,…..k;
, j =
1,2,…..k;
В безразмерной системе координат верхний уровень равен +1, а нижний равен –1, координаты центра плана равны нулю и совпадают с началом координат.
3. План эксперимента:
В матрицу планирования (Табл. 1.1) записываются все возможные значения граничных величин в натуральном масштабе.
Таблица 1.1
| Номер опыта | Значения факторов в натуральном масштабе | выход | ||||
|
X1 |
X2 |
… |
Xn |
Y | ||
| 1 |
X11 |
X 12 |
… |
X 1 n |
Y1 |
|
| 2 |
X 21 |
X2 2 |
… |
X 2 n |
Y2 |
|
| …. | … | … | … | … | ... | |
| N |
X N1 |
X N2 |
… |
XNn |
YN |
|
Страницы: 1, 2, 3, 4, 5, 6, 7, 8, 9
