

 Курсовая работа: Организация и применение микропроцессорных систем обработки данных и управления
Курсовая работа: Организация и применение микропроцессорных систем обработки данных и управления
Курсовая работа: Организация и применение микропроцессорных систем обработки данных и управления
Работу подготовил Сергей
Магнитогорский Государственный Профессионально-педагогический колледж
Магнитогорск, 2005 г.
1. Логическая структура микропроцессорной системы
При проектировании систем контроля, управления или вычислений на основе микропроцессора необходимо выяснить и описать функции, подлежащие выполнению в системе, а затем согласовать их с возможностями тех микропроцессоров, которые могут быть использованы в проектируемой системе.
Реальная электронная система на основе микропроцессора содержит значительное число функциональных устройств, одним из которых является микропроцессор. Все устройства системы имеют стандартный интерфейс и подключаются к единой информационной магистрали, как это показано на рис.1.
Микропроцессор в зависимости от требований, предъявляемых к системе, может быть устройством однокристальным или одноплатным, созданным на основе многокристального комплекта микропроцессорных БИС. В высокопроизводительных системах микропроцессор строится на основе биполярных микропроцессорных секций БИС.
Микропроцессор выполняет в системе функции центрального устройства управления и устройства арифметическо-логического преобразования данных. В качестве устройства управления он генерирует последовательности синхронизирующих и логических сигналов, которые определяют последовательности срабатывания всех логических устройств системы. Микропроцессор задает и последовательно осуществляет микрооперации извлечения команд программы из памяти системы, их расшифровку и исполнение. Тип операций микропроцессора определяется кодом операции в команде. В соответствии с этими кодами микропроцессор выполняет арифметические, логические или иные операции над числами, представленными в двоичном или кодированном двоично-десятичном коде.
Числа, подвергающиеся операционным преобразованиям в арифметическо-логическом блоке микропроцессора, называют операндами. Операнд может быть одним из исходных чисел, результатом, константой или некоторым параметром. Операция в микропроцессоре производится над одним или двумя операндами.
Память микропроцессорной системы физически реализуется на основе различных ЗУ. Технико-экономическая целесообразность ведет к построению иерархической памяти на основе полупроводниковых постоянных и оперативных запоминающих устройств и магнитных внешних запоминающих устройств.
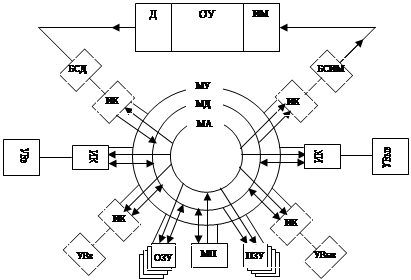
Рис.1 Логическая структура микропроцессорной системы
Полупроводниковые постоянные запоминающие устройства ПЗУ позволяют в процессе работы системы осуществлять только чтение заранее записанных данных. Имеют высокую скорость работы и энергонезависимы, т.е. сохраняют информацию при выключении питания.
Полупроводниковые оперативные запоминающие устройства ОЗУ работают в режимах оперативной (совпадающей с темпом работы микропроцессора) записи и чтения данных. Недостаток ОЗУ – их энергозависимость, т.е. потеря записанной информации при выключении питания.
Память системы адресуема, т.е. каждое слово записывается в ячейке памяти со своим уникальным адресом. Слово – совокупность двоичных единиц (бит) – двоичных разрядов, интерпретируемых как отдельное число или несколько смысловых групп двоичных разрядов. Для получения числа из памяти или записи числа в память необходимо точно задать его адрес в памяти и осуществить операцию считывания данных из памяти.
Устройства ввода данных (УВв) – любые средства, предназначенные для передачи данных извне в регистры микропроцессора или в память (клавиатура пульта управления, ввод с перфолент и перфокарт, внешние запоминающие устройства на магнитных лентах, кассетах, дисках, дисплеи и т.д.).
Устройства вывода данных (УВвыв) – любые средства, способные воспринимать данные, передаваемые из регистров микропроцессора или ячеек памяти (дисплеи, печатающие устройства, внешние запоминающие устройства, пульт управления и т.д.).
Для подключения разнообразных устройств ввода или вывода данных (а также комбинированных устройств ввода-вывода) необходимо привести их все связи и сигналы к стандартному виду, т.е. провести согласование интерфейсов. Для этого используется специальный аппаратурный блок – информационный контроллер ИК, имеющий стандартный интерфейс со стороны подключения к информационной магистрали и нестандартный интерфейс со стороны устройств ввода-вывода, т.е. являющийся преобразователем интерфейсных сопряжений.
Микропроцессор МП, ОЗУ и ПЗУ вместе с УВвыв, предназначенными для операций с человеком или другой электронной системой, называется микро-ЭВМ. Микро-ЭВМ – это ЭВМ, центральная часть которой в составе процессора, ОЗУ, ПЗУ, информационного контроллера построена на основе БИС. Применение БИС в качестве основных элементных компонентов обеспечивают микро-ЭВМ такие преимущества перед другими типами ЭВМ, как компактность, надежность, малая материалоемкость, низкие мощность потребления и стоимость. Но магистральная структура микро-ЭВМ и скоростные ограничения микропроцессора определяют умеренные характеристики производительности микро-ЭВМ. Это относится к микро-ЭВМ на основе микропроцессоров на одном или нескольких кристаллах. В микро-ЭВМ на основе биполярных микропроцессорных секций можно получить высокое быстродействие за счет реализации конвейерной обработки данных и скоростного высокоэффективного управления вычислительным процессом даже при магистральной структуре.
Микро-ЭВМ становится центральной частью электронной системы контроля, управления и вычислений, когда она вводится в контур управления некоторого объекта (процесса). Для сопряжения с микро-ЭВМ объект (процесс) должен быть оснащен датчиками состояния и исполнительными механизмами. Датчики выступают как источники вводимой для микро-ЭВМ информации, а исполнительные механизмы – как приемники выводимой информации. Для согласования интерфейсов подключение датчиков и исполнительных механизмов в системе осуществляется через блоки сопряжения датчиков и исполнительных механизмов.
В зависимости от особенностей объекта (процесса) и возможностей микропроцессора сложность каждого устройства или блока устанавливается на этапе проектирования. Части системы могут развиваться или вырождаться, но должен быть обеспечен общий принцип построения и работы всех электронных систем управления. Вследствие прямой зависимости между функциями программных и аппаратурных средств можно при построении электронной системы развивать либо аппаратуру, либо усложнять программное обеспечение. Именно эти обстоятельства и определяют массовые возможности применения микропроцессорных систем управления практически во всех сферах.
Логическая структура универсального программируемого контроллера.
Контроллер (блок местного управления) необходим для управления аппаратами ввода-вывода информации (АВВ). Он обеспечивает электромеханическое и логическое сопряжения информационного канала ЭВМ и частей АВВ, являющихся источниками или приемниками управляющей информации и данных, задает порядок следования, количество, электрические параметры, положение во времени и направление прохождения информации между информационными каналами и АВВ. Основная задача контроллера заключается в обеспечении условий отпирания и запирания одиночных вентилей или их групп, а также в запуске различного рода электрических двигателей, электромеханических переключателей, возбуждении соленоидов, приеме усиленных и сформированных разнообразных сигналов датчиков информации АВВ.
При любых вариантах функционального разбиения системы на части аппаратурные средства блока сопряжения с АВВ либо интегрируется со средствами БИС микропроцессора, либо выполняются отдельно в виде интерфейсной (интерфейсных) БИС.
Контроллер можно выполнить жестким соединением между группами вентилей, триггеров и т.д. как цифровой автомат на основе аппаратурной логики. Минимизация количества электронных элементов для корпусов интегральных схем, как правило, приводит к неупорядоченной электронной структуре, специализированной на конкретное использование только в данном устройстве. Изменение во временной диаграмме или введение новых сигналов в аппаратурном контроллере влекут за собой необходимость перепроектирования и переконструирования всего контроллера или его части.
Универсальные программируемые контроллеры реализуются в виде однокристальных БИС или на основе секций микропроцессорных комплектов БИС. В таких контроллерах разнообразные временные диаграммы сигналов и их последовательности порождаются не распределением регулярных сигналов тактовых генераторов путем проводных соединений, а преобразованием последовательностей команд (микрокоманд). Из-за гибкости программных и микропрограммных средств адаптации программируемого контроллера к конкретной области применения осуществляется за счет перепрограммирования, не затрагивающего аппаратурную реализацию контроллера или вызывающего только перезапись содержимого управляющих запоминающих устройств.
Технико-экономические параметры интегральных схем с высокой степенью интеграции элементов позволяют осуществлять управление АВВ информации ЭВМ посредством электронных структур, подобных структурам управляющих ЭВМ. При этом обеспечиваются: 1) функциональная гибкость за счет использования развитых систем команд и построения разнообразных сложных последовательностей сигналов на их основе с возможностью учета реакции системы на выдаваемые сигналы; 2) использование распределенных методов управления в иерархических управляющих системах, когда оптимизация процесса преобразования информации ведется на верхнем уровне управления, а непосредственное локальное управление осуществляется встроенным контроллером, воспринимающим и интерпретирующим как состояние АВВ, так и управляющие сигналы средств более высокого уровня управления; 3) простота специализации и модификации устройства управления АВВ.
Алгоритм управления определенным типом АВВ задается однозначно и в виде программы может быть записан в ПЗУ. Таким образом, программируемый контроллер в процессе работы многократно может выполнять одну и ту же программу, получая с более высокого уровня управления исходные данные и задания и функционируя автономно, независимо и параллельно с работой средств более высокого уровня.
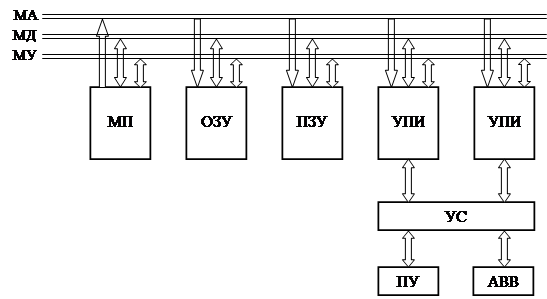
Рис.2 Логическая структура универсального программного контроллера
Логическая структура универсального программируемого контроллера приведена на рис.2. Контроллер имеет магистральную структуру. Управление АВВ обеспечивают микропроцессор МП, микроконтроллер и микро-ЭВМ, выполненная на одном кристалле. Если аппаратурных возможностей микропроцессора МП недостаточно, то к магистралям подключаются расширяющие ОЗУ и ПЗУ; поле памяти этих устройств может управлять дополнительным контроллером. Однако в отличие от микро-ЭВМ в контроллере системные функции расширяющих ОЗУ и ПЗУ развиты очень слабо и поэтому для управления ими достаточно простейших аппаратурных средств, обычно закладываемых в кристаллы БИС ОЗУ и ПЗУ. Узлы программируемого интерфейса УПИ и узлы сопряжения УС с пультом управления ПУ и АВВ имеют модульную структуру, что позволяет наращивать их при усложнении АВВ и увеличении их числа. Контроллер работает по жестко заданной, заранее отработанной и введенной в него программе. Во время работы контроллера нет необходимости в его взаимодействии с человеком.
Узлы программируемого интерфейса УПИ дают возможность учесть специфику АВВ и осуществить переход от внутрисистемного интерфейса информационной магистрали к интерфейсу разнообразных АВВ. Специализация шин управления АВВ обеспечивается подачей сигналов при выполнении определенной последовательности команд МП; их число зависит от числа узлов программируемого интерфейса УПИ.
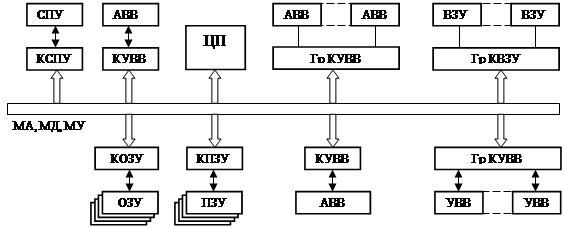
Рис.3 Обобщенная логическая структура микро-ЭВМ с микропроцессорными контроллерами
Логическая структура развитой микропроцессорной системы
На рис.3 приведена обобщенная логическая структура микро-ЭВМ, в которой в качестве всех управляющих блоков устройств ЭВМ используются программируемые контроллеры, например контроллер системного пульта управления КСПУ. Он применяется для работы с системным пультом управления СПУ. Все аппараты ввода-вывода управляются контроллерами устройств ввода-вывода КУВВ или групповыми контроллерами устройств ввода-вывода ГрКУВВ. Оперативное ОЗУ и постоянные запоминающие устройства ПЗУ управляются с помощью соответствующих контроллеров КОЗУ, КПЗУ. При такой организации ЭВМ центральный процессор ЦП обеспечивает программируемые контроллеры только управляющей информацией высокого уровня, детализируемой контроллером. Поэтому количество управляющей информации на информационной магистрали системы резко уменьшается, что позволяет увеличить скорость передачи данных. По существу, в этой схеме приведена многопроцессорная вычислительная система, в которой в пределе контроллер имеет те же возможности, что и центральный процессор. Низкая стоимость и высокая надежность БИС позволяют для достижения желаемых параметров ввести распределенную обработку во всех подсистемах вычислительной системы, что определяет новые способы организации вычислительных процессов в системах с децентрализованными управлением и обработкой информации.
2. Интерфейс микропроцессоров
Для включения микропроцессора в любую микропроцессорную систему необходимо установить единые принципы и средства его сопряжения с остальными устройствами системы, т.е. унифицированный интерфейс.
Унифицированный интерфейс – совокупность правил, устанавливающих единые принципы взаимодействия устройств микропроцессорной системы. В состав интерфейса входят аппаратурные средства соединения устройств (разъем и связи), номенклатура и характер связей, программные средства, описывающие характер сигналов интерфейса и их временную диаграмму, а также описание электрофизических параметров сигналов.
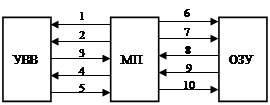
Рис.4 Схема интерфейсных связей микропроцессора
На рис.4 представлена общая схема взаимодействия микропроцессора МП с устройствами ввода – вывода УВВ и ОЗУ в микропроцессорной системе. Связь МП с УВВ требует пяти групп связи, обеспечиваемых через выводы корпуса. По группе шин 1 передается код выбора (адреса) устройства, по шине 2 – сигнал управления считыванием – записью, по шине 3 – сигнал запроса на прерывания, шины 4 и 5 используются для передачи данных от процессора к УВВ и от УВВ к МП. Связь МП с ОЗУ также содержит пять групп связей, которые необходимо обеспечить через выводы корпуса МП. По группе шин 6 передается адрес в ОЗУ, шина 7 нужна для управления чтением/записью, по сигналам на шине 8 принимаются команды в процессор, а шины 9 и 10 обеспечивают передачу данных из ОЗУ в МП и обратно.
Информационные магистрали
При проектировании БИС и устройств на их основе необходимо принимать во внимание сложность выполнения разветвленных связей между различными узлами (блоками) и устройствами. Поэтому практически реализованы и получили широкое распространение магистральные структуры связей, к которым подключены входы и выходы электронных узлов (блоков). Информационная магистраль (МИ) представляет собой совокупность проводников (шин) или кабелей, физические свойства которых обеспечивают передачу высокочастотных информационных сигналов. Электронные узлы (блоки), подключаемые к информационной магистрали, должны обладать определенными свойствами, иначе возможно образование короткозамкнутых связей и низкоомных нагрузок.
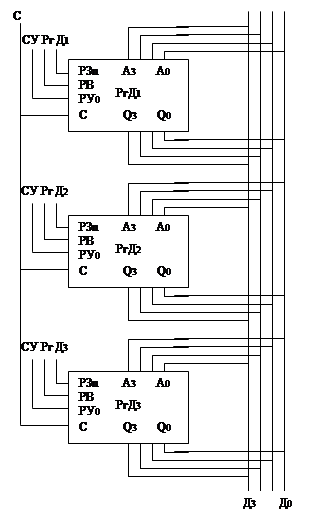
Рис.5 Схема магистральных связей трех регистров данных
Рассмотрим пример передачи данных в системе трех 4-разрядных синхронизируемых регистров с информационными магистральными связями, позволяющий определить общие закономерности построения подобных структур (рис.5).
Входные сигналы записи данных А0-А3 передаются в регистр и вызывают срабатывание триггеров только на переднем фронте сигнала синхронизации при наличии управляющего сигнала “Разрешение записи” РЗn. Если сигнал РЗn=0, то сигналы входных данных не проходят на входы триггеров и поэтому не могут изменить состояние регистра. Входные сопротивления для информационных входов Ai при этом становятся достаточно большими, их параллельное подключение к шинам магистрали данных не ведет к каким-либо проблемам.
Выходные информационные сигналы Q0-Q3 в рассматриваемых схемах формируются с помощью управляемых трехуровневых каскадов, вырабатывающих выходные сигналы логических состояний “0”, “1” и “Выключено”. Управление выходными каскадами триггеров регистра осуществляется сигналом “Разрешение выдачи” РВ. При запрете выдачи выходных состояний (РВ=0) выходные каскады переводятся в режим с высоким выходным сопротивлением. Поэтому параллельное подключение выходных выводов регистров к шинам информационной магистрали также не порождает проблем.
