

 Реферат: Синтез оптимальных уравнений
Реферат: Синтез оптимальных уравнений
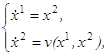
Для этого объекта рассмотрим задачу о быстрейшем попадании в начало координат (0, 0) из заданного начального состояния x0=(x01, x02). Иначе говоря, будем рассматривать задачу об оптимальном быстродействии в случае, когда конечным положением служит точка x1=(0, 0). Механически это означает, что материальную точку, имеющую заданное положение x01 и заданную начальную скорость x02, мы хотим за кратчайшее время привести в начало отсчёта с нулевой скоростью (т. е. добиться того, чтобы точка пришла в начало отсчёта и остановилась там).
Функция H в рассматриваемом случае имеет вид
H=ψ1x2+ψ2u (1.31)
(см. (1.29) и (B)). Далее, для вспомогательных
переменных ψ1, ψ2 мы получаем
систему уравнений ![]() . Из этой системы
уравнений находим: ψ1=d1;
ψ2= ─d1t+d2, где d1, d2 ─
постоянные интегрирования. Далее, в силу соотношения максимума (D) мы находим, учитывая (1.31) и (1.30):
. Из этой системы
уравнений находим: ψ1=d1;
ψ2= ─d1t+d2, где d1, d2 ─
постоянные интегрирования. Далее, в силу соотношения максимума (D) мы находим, учитывая (1.31) и (1.30):
u(t)= +1, если ψ2(t)>0; u(t)= ─1, если ψ2(t)<0.
Иначе говоря, u(t)=sign ψ2(t)=sign (─ d1t + d2).
Отсюда следует, что каждое оптимальное управление u(t), t0≤t≤t1,
является кусочно-постоянной функцией, принимающей значения ![]() и имеющей не более
двух интервалов постоянства (ибо линейная функция ─d1t + d2 не более одного раза меняет знак на отрезке
t0≤t≤t1).
и имеющей не более
двух интервалов постоянства (ибо линейная функция ─d1t + d2 не более одного раза меняет знак на отрезке
t0≤t≤t1).
Для отрезка времени, на котором
u![]() 1, мы имеем
(в силу системы (1.29))
1, мы имеем
(в силу системы (1.29))  , откуда
находим
, откуда
находим
x1=1/2(x2)2+c. (1.32)
 |
Аналогично для отрезка времени,
на котором u![]() ─1,
мы имеем, откуда находим
─1,
мы имеем, откуда находим
x1= ─1/2(x2)2 + c’. (1.33)
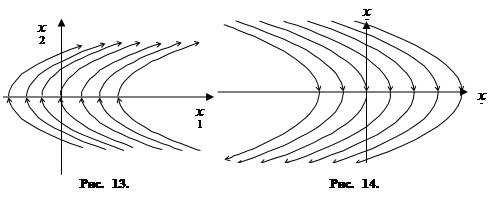
Семейство парабол (1.33) (также получающихся друг из друга
сдвигом в направлении оси x1)
показано на рис. 14. По параболам (1.33) фазовые точки движутся сверху вниз
(ибо ![]() )
)
 |
Как было указано выше, каждое оптимальное управление u(t) является кусочно-постоянной функцией, принимающей значения
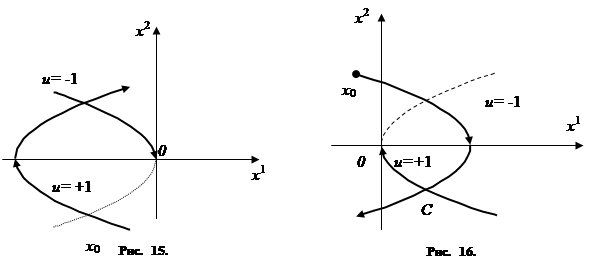
На рис. 17 изображено всё семейство полученных таким образом фазовых траекторий (здесь AO ─ дуга параболы x1=1/2(x2)2, расположенная в нижней полуплоскости; BO ─ дуга параболы x1= ─1/2(x2)2, расположенная в верхней полуплоскости).
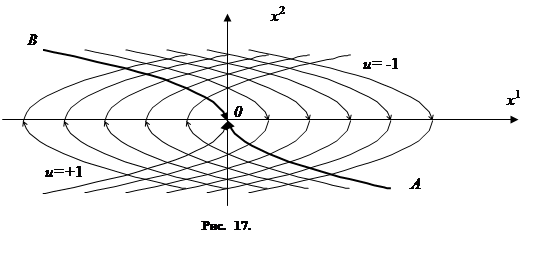 |
Итак, согласно принципу максимума только изображённые на рис. 17 траектории могут быть оптимальными, причём видно, что из каждой точки фазовой плоскости исходит только одна траектория, ведущая в начало координат, которая может быть оптимальной (т. е. задание начальной точки x0 однозначно определяет соответствующую траекторию).
8. Проблема синтеза оптимальных управлений. Посмотрим на разобранный в предыдущих пунктах пример с несколько иной точки зрения. Найденное выше решение оптимальной задачи можно истолковать следующим образом. Обозначим через v(x)= +1 ниже линии AOB и на дуге AO, v(x)= ─1 выше линии AOB и на дуге BO. Тогда (см. 17) на каждой оптимальной траектории значение u(t) управляющего параметра (в произвольный момент времени t) равно v(x(t)), т. е. равно значению функции v в той точке, в которой в момент t находится движущаяся фазовая точка, пробегающая оптимальную траекторию u(t)=v(x(t)). Это означает, что, заменив в системе (1.29) величину u функцией v(x), мы получим систему
 (1.34)
(1.34)
решение которой (при произвольном начальном состоянии x0) даёт оптимальную фазовую траекторию, ведущую в начало координат. Иначе говоря, система (1.34) представляет собой систему дифференциальных уравнений (с разрывной правой частью) для нахождения оптимальных траекторий, ведущих в начало координат.
Рассмотренный пример показывает, что решение задачи об оптимальных управлениях естественно ожидать в следующей форме. Будем решать оптимальную задачу в общей постановке:
![]()
![]()
(см. п. 3), рассматривая всевозможные начальные состояния и каждый раз предписывая в качестве конечного состояния начало координат O фазового пространства. Тогда (насколько можно судить по разобранному выше примеру) существует такая функция v(x), заданная в фазовом пространстве V принимающая значения в области управления U, что уравнение
![]() (1.35)
(1.35)
определяет все оптимальные траектории, ведущие в начало координат. Иначе говоря, оптимальное управление оказывается естественным искать не в форме u=u(t), а в форме u=v(x), т. е. искомое оптимальное управление в каждый момент зависит лишь от того, в какой точке пространства находится в данный момент фазовая точка.
Функцию v(x), дающую уравнение оптимальных траекторий в форме (1.35), называют синтезирующей функцией, а задачу нахождения синтезирующей функции ─ задачей синтеза оптимальных управлений. В разобранном примере синтезирующая функция была кусочно-непрерывной (даже кусочно-постоянной).
Г л а в а II
ЛИНЕЙНЫЕ ОПТИМАЛЬНЫЕ БЫСТРОДЕЙСТВИЯ
§ 4. Линейная задача оптимального управления
9. Формулировка задачи. Ниже будут подробно изучены управляемые объекты, движение которых описывается линейными дифференциальными уравнениями относительно величин x1,…,xn, u1,…,ur, т. е. уравнениями вида
 i=1,2,…,n, (2.1)
i=1,2,…,n, (2.1)
где aiα и biβ ─ некоторые постоянные коэффициенты.
Одним из наиболее важных для приложений является случай, когда каждая из величин u1,u2,…,ur в уравнениях (2.1) представляет собой отдельный управляющий параметр, область изменения которого не зависит от значений остальных управляющих параметров и задаётся неравенствами
![]() β=1,…,r. (2.2)
β=1,…,r. (2.2)
Как было указано выше (см. п. 4), эти неравенства определяют r-мерный параллелепипед.
В дальнейшем при рассмотрении объектов вида (2.1) будет предполагаться, что управляющий параметр u=(u1, u2,…, ur) может меняться в замкнутой области управления U, представляющей собой выпуклый многогранник (лежащий в пространстве переменных u1, u2,…, ur).
Для того чтобы записать уравнения (2.1) в векторной форме, мы введём в рассмотрение матрицы
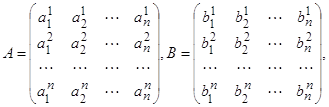 (2.3)
(2.3)
элементами которых являются коэффициенты aiα, biβ, входящие в уравнения (2.1). Как обычно, результат применения матрицы A к вектору x=(x1, x2,…, xn) мы будем обозначать символом Ax, т. е. y=Ax есть n-мерный вектор, координаты которого определяются формулами
 (2.4)
(2.4)
Аналогично для
любого r-мерного вектора u=(u1, u2,…,
ur) через Bu
обозначается вектор, i-я координата которого
равна  Таким образом, матрица A определяет линейное отображение координатного n-мерного пространства снова в n-мерное
пространство, а матрица B определяет отображение
r-мерного пространства в n-мерное.
Таким образом, матрица A определяет линейное отображение координатного n-мерного пространства снова в n-мерное
пространство, а матрица B определяет отображение
r-мерного пространства в n-мерное.
Пользуясь матрицами A и B, мы можем теперь записать уравнения (2.1) в векторной форме:
![]() (2.5)
(2.5)
Пусть u(t)=(u1, u2,…, ur) ─ произвольное допустимое (в смысле п. 4) управление, заданное на некотором отрезке t0≤t≤t1, и x0=(x10,…, xn0) ─ некоторая точка фазового пространства. Обозначим θ1, θ2,…, θk все точки, в которых хотя бы одна из функций u1(t), u2(t),…, ur(t) терпит разрыв, причём занумеруем эти точки таким образом, что t0<θ1<θ2<…<θk<t1. Подставив функции u1(t), u2(t),…, ur(t) в правые части системы (2.1),мы придём к системе уравнений
 (2.6)
(2.6)
или в векторной форме,
![]() (2.7)
(2.7)
Систему (2.7) мы рассмотрим сначала для значений t, удовлетворяющих неравенствам t0≤t≤θ1. На этом отрезке изменения аргумента существуют такие функции x1(t),…, xn(t), определённые и непрерывные на всём отрезке t0≤t≤θ1, которые, рассматриваемые на интервале t0<t<θ1, являются решениями системы (2.6) и, кроме того, удовлетворяют начальным условиям x1(t0)=x10, x2(t0)=x20,…, xn(t0)=xn0 (согласно сведениям из дифференциальных уравнений (см. книгу Л.С. Понтрягина «Обыкновенные дифференциальные уравнения», «Наука», М., 1965 (стр. 23, 24 и 168-172))).
Теперь мы можем рассмотреть систему (2.6) на отрезке θ1≤t≤θ2, воспользовавшись точкой γ1=(x1(θ1),…, xn(θ1), θ1) в качестве начального значения. На отрезке θ1≤t≤θ2 снова существует решение с начальным значением γ1. Это решение мы снова обозначим через x(t)=(x1(t),…, xn(t)). Теперь функция x(t) построена на отрезке t0≤t≤θ2 и непрерывна на всём этом отрезке (и, в частности, в «точке сопряжения» θ1;). Воспользовавшись, далее, новым начальным значением γ2=(x1(θ2),…, xn(θ2), θ2), мы продолжим эту функцию x(t) на отрезок θ2≤t≤θ3 и т. д. В конце концов мы определим x(t) на всём отрезке t0≤t≤t1.
Полученная функция x(t)=(x1(t),…, xn(t)) непрерывна на всём отрезке t0≤t≤t1 и является на нём кусочно-дифференцируемой; именно, во всех точках интервала t0<t<t1, кроме θ1, θ2,…, θk, функция x(t) непрерывно дифференцируема (и удовлетворяет системе (2.6)). Построенную функцию мы будем называть решением системы (2.6) (или уравнения (2.7)), соответствующим управлению u(t), при начальном условии x1(t0)=x10, x2(t0)=x20,…, xn(t0)=xn0. Наконец, мы будем говорить, что допустимое управление u(t), t0≤t≤t1, переводит фазовую точку из состояния x0 в состояние x1 (в силу закона движения (2.1) или (2.5)), если соответствующее ему решение x(t) системы (2.1), удовлетворяющее начальному условию x(t0)=x0, приходит в момент t1 в точку x1, т. е. удовлетворяет также «конечному» условию x(t1)=x1.
Теперь можно уточнить постановку задачи.
Линейной задачей оптимального управления мы будем называть задачу об отыскании оптимальных быстродействий в случае, когда выполнены следующие три условия:
1 ) уравнения движения объекта линейны (см. (2.1) или (2.5));
2 ) предписанное конечное состояние x1 совпадает с началом координат (0, 0,…, 0) n-мерного фазового пространства переменных x1, x2,…,xn;
3 ) область управления U является r-мерным выпуклым многогранником в r-мерном пространстве (u1, u2,…, ur), причём начало координат этого пространства принадлежит многограннику U, но не является его вершиной.
Заметим, что начало координат xi=0, i=1,…,n, является положением равновесия системы
 (2.8)
(2.8)
получающейся из системы (2.1) отбрасыванием управлений (т. е. получающейся из (2.1) при u1=u2=…=ur=0). Таким образом, условие 2) означает, что ищется управление, переводящее объект из заданного начального состояния x0 в положение равновесия.
